What is a 3-position enabling switch? | USA
A highly automated production facility, such as the example shown in figure 1, may appear to require no human intervention.
However, as shown in figure 2, there are many tasks that increase the risk level compared to normal operation. These include times when a human enters a area with machine guarding (a hazardous zone) and carries out manual tasks near to the robot arm and other moving parts during equipment startup, changeovers, or robot teaching.
The 3-position enabling switch (also referred to as an ‘enabling switch’ on this page) is an effective device for ensuring safety in these situations.
Enabling switches are built into the design of portable control devices, such as robot teaching pendants. These enable manual operation of machinery through intentional human action. They are also safety devices, designed to stop machinery by interrupting the operating signal through an immediate reflex reaction from a human in danger.
How 3-position enabling switches work
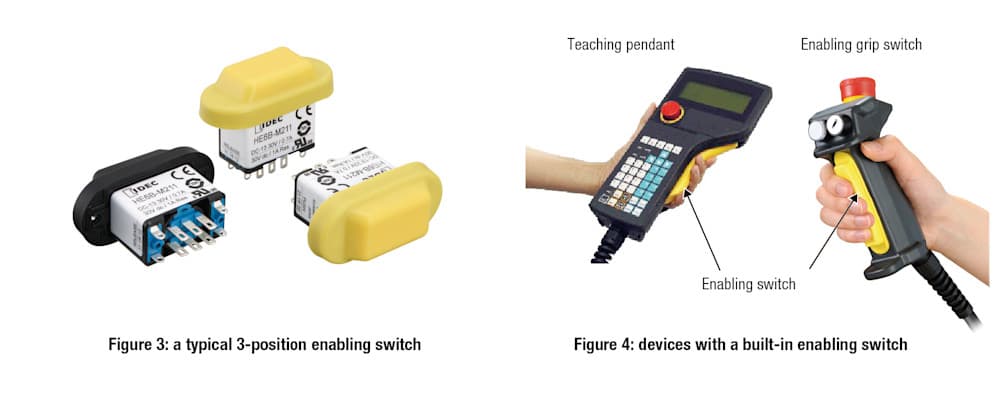
Figure 3 shows examples of standard enabling switches, and figure 4 shows examples of devices with built-in enabling switches.
The switch works in 3 positions
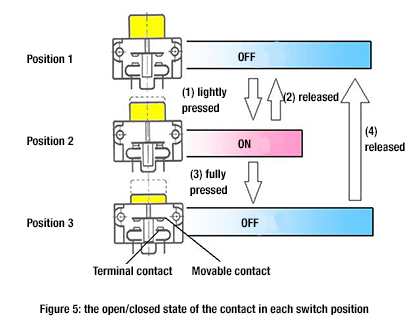
In contrast to the 2-position ON/OFF format of standard switches, an enabling switch has 3 positions: OFF, ON, and OFF. Figure 5 shows the different switch operation positions, and the ON/OFF status of the switch contacts.
Position 1 is the state where the switch is not being used. As the contact is off, the machine cannot be manually operated.
Position 2 is the state where the switch is lightly pressed. The contact is turned on, and the machine can be manually operated.
As a common use example, robot teaching can only be carried out in this state. Note that if the switch is released from position 2, it will return to position 1, the contact will be turned off, and manual operation of the machine will be disabled (the machine will stop).
Position 3 is the state where the switch is pressed even further than in position 2. The contact is turned off, and manual operation of the machine is disabled (the machine is stopped). In addition, when returning to position 1 after the switch has been pressed to position 3 (releasing the switch), the contact will remain off.
Why position 3 exists
When you think about manual operation of equipment, positions 1 and 2 seem to be enough by themselves. So why do enabling switches have position 3?
It exists because it takes human reflexes into account.
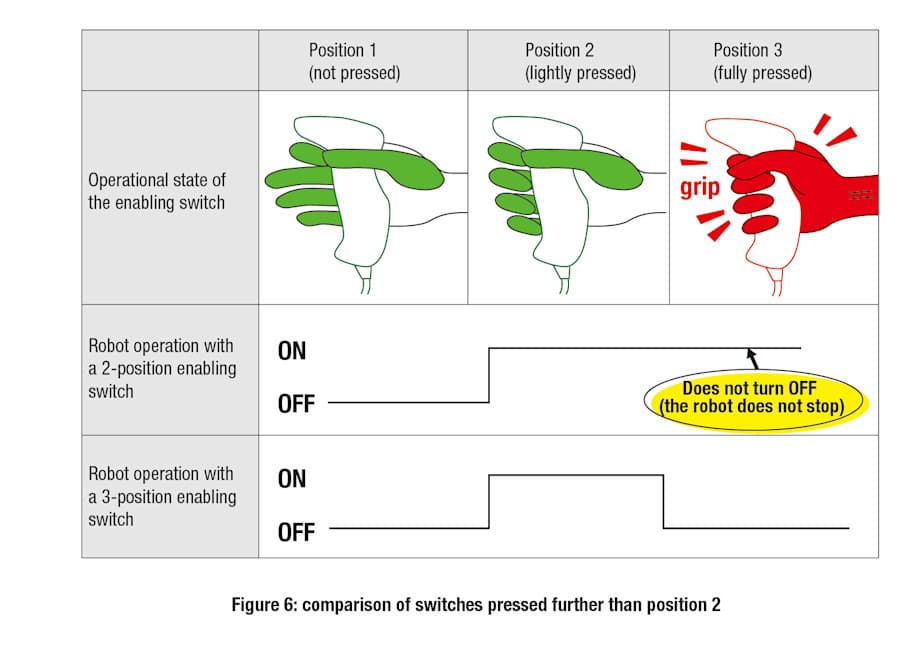
When a human encounters unexpected dangers, they have two common reflex responses: either to let go of the switch, or to hold it more tightly.
Manual operation is enabled while a human is intentionally holding the switch in position 2. This allows them to carry out robot teaching and other tasks. During this time, if the robot or machine moves unexpectedly (e.g. due to operational errors or noise), the human is exposed to danger. When that happens, the human, startled by unexpected movement, either reflexively lets go of the teaching pendant or holds it more tightly.
However, as this is a reflex reaction by a surprised human, it is not possible to predict whether their response will be to let go or to hold more tightly. There is no way to know which decision they will make until they make it.
For this reason, position 3 exists to stop the machinery not just when a human lets go of the teaching pendant, but also when they hold it more tightly.
Fault detection
3-position enabling switches are primarily used in environments where safety interlocks on doors are unlocked, and humans and machines are working together inside an area with machine guarding. They are effective devices for reducing risk in these environments.
As such, a safety system that uses enabling switches must provide the same high level of safety performance as a door interlock device. For example, a safety system with an enabling switch for an industrial robot (or a robotics system with an industrial robot) is normally required to satisfy safety standard requirements for Performance Level d (PLd) with Category 3.
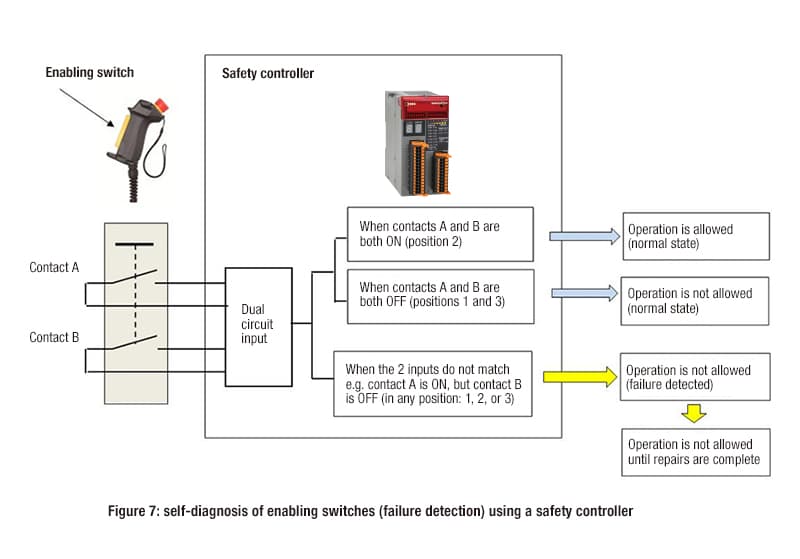
By combining a safety controller and 3-position enabling switch with contact redundancy to build a safety control system, it is possible to prevent hazardous situations caused by contact failure. This type of system offers a high level of safety performance (as shown in figure 7).
3-position enabling switch applications
As explained above, enabling switches act as a risk reduction measure for human-machine interactions. They make use of the human’s reflex reaction – letting go of the switch or tightening their grip when startled – to stop the machine.
3-position enabling switches are mainly built into robot teaching pendants, to ensure the safety of humans carrying out teaching work close to robots.
However, the risk reduction measure created by the human reflex response is not limited to use with robots. In applications that rely on the ability to stop machinery to ensure safety, enabling switches hold great potential for risk reduction.
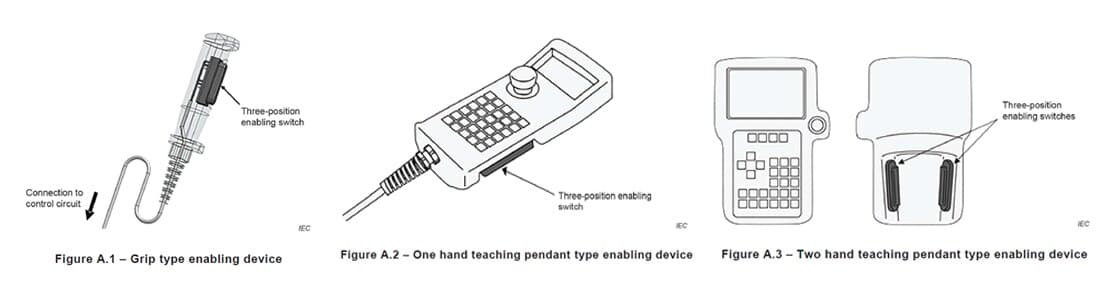
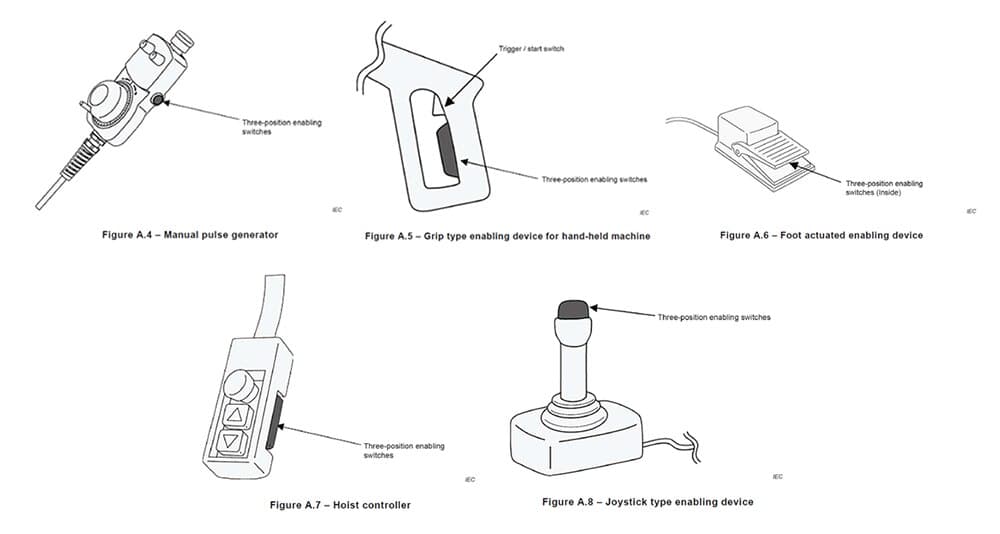
Given this potential, the IEC 60947-5-8:2020 safety standard (Low-voltage switchgear and control gear – Part 5-8: Control circuit devices and switching elements – Three-position enabling switches) includes the following example applications. (The figures below are from IEC 60947-5-8:2020.)
Figures A.1 to A.3 show examples of teaching pendants and grip switches for robotics industry applications, areas where enabling switches are mainly used.
Figures A.4 to A.8 show examples of new applications.
IDEC 3-position enabling switches
We provide a wide range of help and resources:
If you have questions or suggestions, we're here to listen.
Our sales and support teams are on hand to help.
All the technical documentation you need.