Qu'est-ce qu'un interrupteur d'activation à 3 positions ? | EMEA
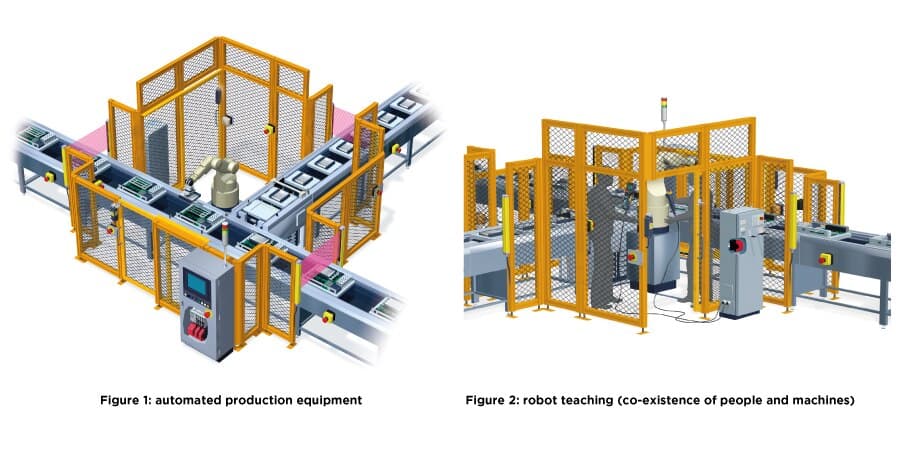
Une installation de production hautement automatisée, telle que celle illustrée à la figure 1, semble ne nécessiter aucune intervention humaine.
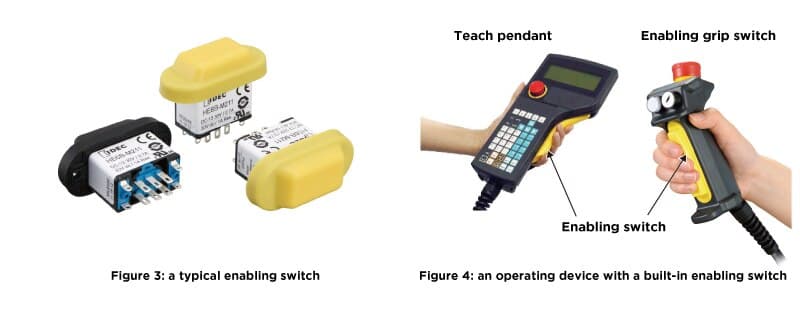
Cependant, comme le montre la figure 2, il existe de nombreuses tâches à haut risque qui sont plus dangereuses que celles effectuées en fonctionnement normal, par exemple lorsque des personnes pénètrent dans la zone de sécurité (zone dangereuse) et effectuent des opérations manuelles à proximité du bras du robot et d'autres pièces mobiles pendant le démarrage, le changement ou les opérations d'apprentissage du robot. Le commutateur d'activation à 3 positions (ci-après dénommé « commutateur d'activation ») est efficace pour garantir la sécurité dans de telles situations.
Les commutateurs d'activation sont intégrés dans des dispositifs de commande portables, tels que les pendentifs d'apprentissage robotique, afin de permettre le fonctionnement manuel de la machine par une personne à l'aide du commutateur d'activation. Ce commutateur est également un dispositif de sécurité qui peut être utilisé pour arrêter la machine en désactivant son fonctionnement par une réaction réflexe immédiate en cas de danger imminent pour les personnes.
Fonctionnement et utilisation du commutateur d'activation
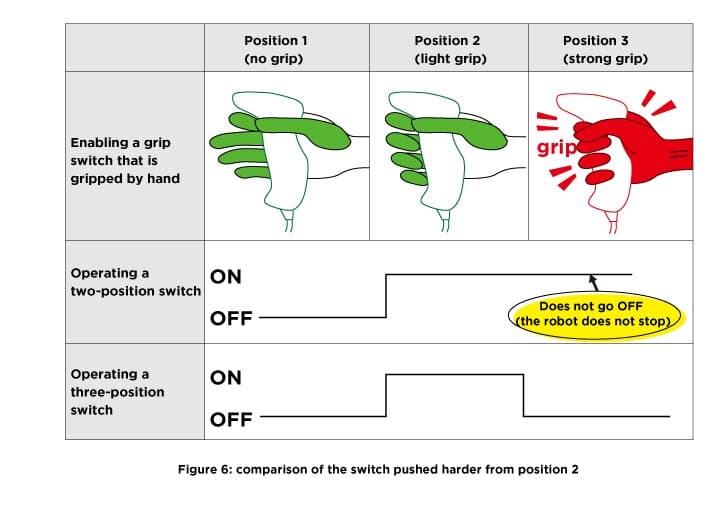
Un commutateur d'activation typique est illustré à la figure 3, et un exemple de dispositif d'activation avec un commutateur d'activation intégré est illustré à la figure 4.
Le bouton se déplace en 3 étapes
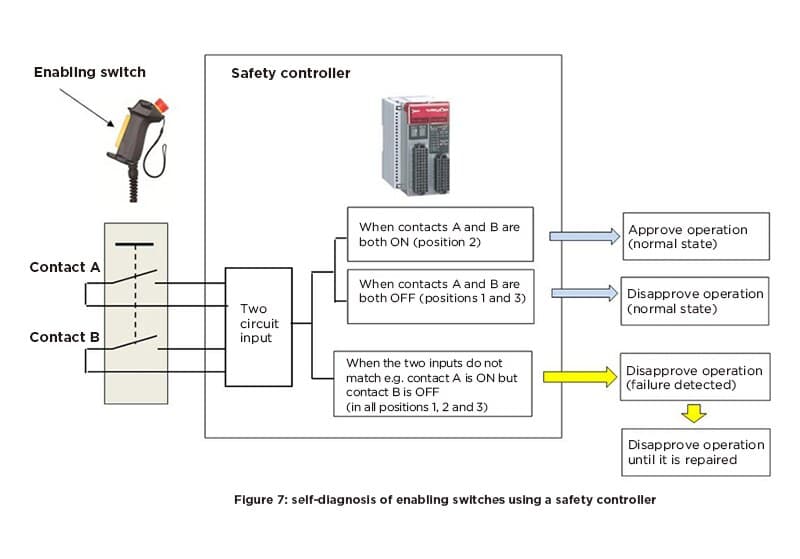
Contrairement au bouton ON/OFF à deux positions d'un interrupteur classique, un interrupteur d'activation dispose de trois positions : OFF, ON et OFF. La figure 5 illustre les positions du bouton et l'état ON/OFF de ses contacts.
La position 1 correspond à l'absence d'action sur le bouton. Le contact étant désactivé, le fonctionnement manuel de la machine n'est pas autorisé.
La position 2 correspond à l'état dans lequel le bouton est légèrement enfoncé. Le contact est activé et le fonctionnement manuel de la machine est autorisé. L'apprentissage du robot ne peut être effectué que dans cet état. Notez que si vous relâchez votre main de la position 2, le bouton revient à la position 1, les contacts se désactivent et la machine s'arrête en raison de la désactivation du fonctionnement manuel de la machine.
La position 3 correspond à l'état dans lequel le bouton est enfoncé davantage à partir de la position 2. Le contact est désactivé et la machine est arrêtée en désactivant le fonctionnement manuel de la machine. De plus, lorsque vous revenez à la position 1 après avoir enfoncé le bouton en position 3, les contacts restent désactivés et reviennent à la position 1.

Pourquoi la position 3 est-elle fournie ?
Si vous envisagez uniquement un fonctionnement manuel, les positions 1 et 2 semblent suffisantes. Alors pourquoi la position 3 est-elle prévue ? C'est parce qu'elle tient compte du comportement réflexe des personnes. Les personnes ont un réflexe qui les pousse à lâcher prise ou à serrer les mains lorsqu'elles sont confrontées à un danger inattendu.
Le fonctionnement manuel est activé lorsque l'opérateur maintient le bouton en position 2 dans le but d'effectuer un apprentissage ou d'autres opérations. Au cours de ce processus, si le robot ou la machine bouge de manière inattendue en raison d'erreurs de fonctionnement ou de bruit, l'opérateur est exposé à un danger. Lorsque cela se produit, l'opérateur, surpris par un mouvement inattendu, lâche instinctivement le boîtier d'apprentissage ou le serre instinctivement très fort.
Cependant, comme il s'agit d'une réaction réflexe d'un opérateur surpris, nous ne pouvons pas prédéterminer si le réflexe sera de lâcher ou de serrer le boîtier d'apprentissage, et cela ne peut être connu qu'au moment venu. C'est pourquoi la position 3 est prévue pour arrêter la machine non seulement lorsque le boîtier d'apprentissage est lâché, mais aussi lorsqu'il est serré fermement.
Détection des défauts
Les interrupteurs d'activation sont des dispositifs qui permettent de réduire les risques, principalement dans les environnements où les verrouillages de porte sont désactivés et où les personnes et les machines travaillent ensemble dans une protection de machine. Pour cette raison, un système de sécurité utilisant un interrupteur d'activation doit présenter un niveau de performance de sécurité élevé, tout comme un dispositif de verrouillage de porte.
Par exemple, un système de sécurité utilisant un interrupteur d'autorisation utilisé dans un robot industriel ou un système robotique utilisant un tel robot est généralement tenu par la norme de satisfaire à PL=d avec la catégorie 3. Par conséquent, en construisant un système qui fournit des contacts redondants pour l'interrupteur d'autorisation et en les combinant avec un contrôleur de sécurité, il est possible d'empêcher la survenue de situations dangereuses dues à une défaillance des contacts dans l'interrupteur d'autorisation et d'obtenir des performances de sécurité élevées (figure 7).
Exemples d'application des commutateurs d'activation à 3 positions
Comme mentionné précédemment, l'interrupteur d'activation est une mesure de réduction des risques pour l'interaction homme-machine qui utilise la réaction réflexe de l'opérateur à relâcher ou serrer la main lorsqu'il est surpris par un danger afin d'arrêter la machine. Il a été principalement installé dans les boîtiers de commande des robots afin d'assurer la sécurité lorsque des personnes effectuent des opérations d'apprentissage à proximité du robot.
Cependant, comme la réaction réflexe d'un travailleur surpris qui relâche ou serre les mains peut contribuer à réduire les risques, son utilisation ne se limite pas aux robots. L'utilisation d'interrupteurs d'activation présente un grand potentiel pour aider à réduire les risques dans les applications où l'arrêt de la machine est une question de sécurité.
À la lumière de cela, les exemples d'application suivants ont été ajoutés dans la dernière norme CEI 60947-5-8:2020 Appareillage à basse tension - Partie 5-8 : Dispositifs de commande et éléments de commutation - Interrupteurs d'autorisation à trois positions. (La figure suivante est tirée de la norme CEI 60947-5-8:2020.)
Les sections A.1 à A.3 ci-dessous présentent des exemples d'applications dans les boîtiers d'apprentissage et les interrupteurs à poignée pour le domaine de la robotique, où les interrupteurs d'autorisation ont été principalement utilisés.
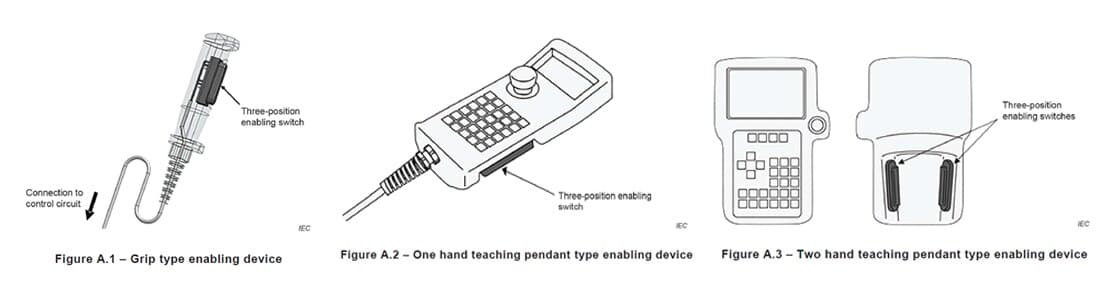
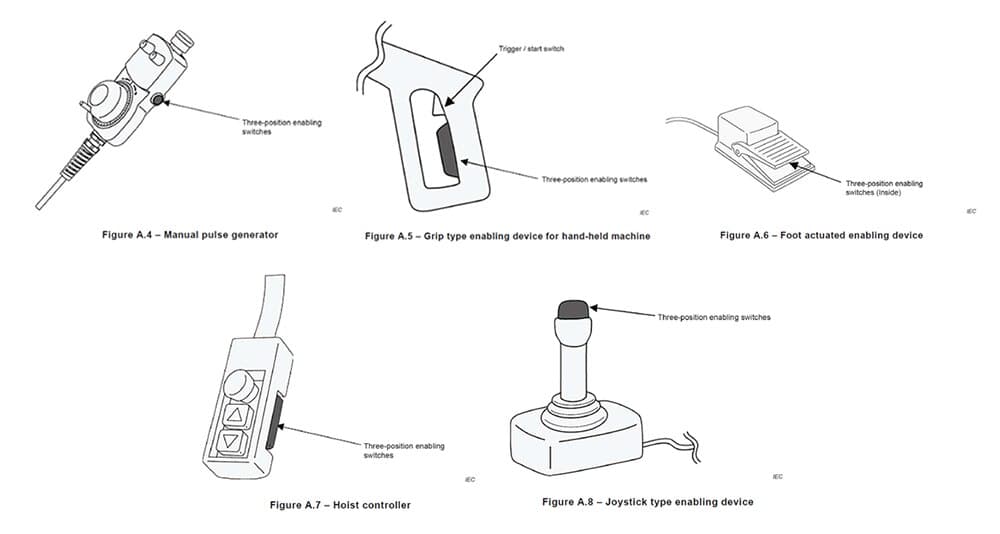
Les points A.4 à A.8 ci-dessous présentent des exemples de nouvelles applications.
Veuillez consulter cette page pour connaître les commutateurs d'activation pouvant être utilisés pour ces applications.
Activation des descriptions de produits
Interrupteurs d'activation à 3 positions IDEC
Obtenez rapidement l’aide et les ressources dont vous avez besoin avec IDEC
Nous répondons à vos questions.
Nous sommes là pour vous aider et vous guider.
Trouvez rapidement ce dont vous avez beoin.