Functionality and compliance, fully integrated: Safety Wheel Drive’s 5 key features to ensure the safety of AGVs and AMRs
Date: 07/05/2025 | By: IDEC HQ
Loading...
When it comes to industrial automation, any product whose name starts with ‘Safety’ needs to live up to high expectations.
Safety Wheel Drive (SWD) is a turnkey solution for OEMs and industrial machine integrators seeking an easier way to build safe, reliable motion control into AGVs/AMRs.
The all-in-one design incorporates the components and safety functions needed to meet both comprehensive international safety requirements and highly specific mobile robotics needs.
In this article, we take a closer look at SWD’s advanced built-in safety functions: what they’re designed for, how they’re activated, and what happens after activation to ensure safe operation.
Safety requirements applied to mobile robotics
AGVs/AMRs made for use in collaborative work environments must be equipped with essential safety functions. These requirements are guided by ISO 3691-4 (Industrial trucks – Safety requirements and verification, part 4: Driverless industrial trucks and their systems).
ISO 3691-4 is a relatively recent standard, published in response to how industrial mobile robots’ capabilities have evolved. It specifies requirements for all of these safety measures:
Speed and direction control
Speed monitoring and limitation
Obstacle detection
Braking system
Emergency stop
SWD’s certified safety functions are used to achieve safe motor control and support AGV/AMR designers in meeting current safety requirements.
These functions can be split into 2 categories:
Safe motor shutdown and brake functions: Safe Torque Off, Safe Brake Control
Safe speed supervision functions: Safe Direction, Safely Limited Speed, Safe Maximum Speed
SWD, in combination with other safety devices (such as the IDEC SE2L Advanced safety laser scanner), contributes to the safe operation of AGVs/AMRs with tailored motion and safety management.
Each safety function is triggered automatically when a hazardous condition or other specific event is detected:
Detection: sensors monitor the environment. As an example, a safety laser scanner sends safety signals to the safety controller built into SWD.
Monitoring: the safety controller monitors whether a dangerous condition has been reached (e.g. the AGV/AMR is moving too quickly, or the AGV/AMR’s movements are abnormal).
Action: the safety function is triggered.
This Detection > Monitoring > Action process chain enables mobile robots to maintain a consistently high level of safety and protection.
5 advanced safety functions that streamline design, certification, and use
These integrated functions remove any need for additional safety monitoring devices and safety logics when using SWD as part of an AGV/AMR build.
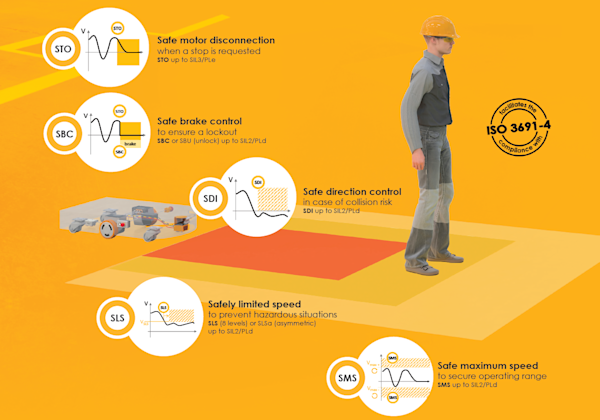
Safe Torque Off (STO): safe disconnection of motor torque
Safety level: up to SIL3, PLe, Safety Category 4
STO is seen as a safe way to stop the motor operation, a basic requirement for drive-based functional safety in mobile robots.
It can be activated by a variety of safety devices and inputs to SWD, including emergency stop switches or a safety relay/safety controller. Connected emergency stop switches must be compliant with ISO 13850.
Once STO is engaged, the motor is disconnected electrically. In this way, STO prevents any more torque (force) from being generated within the motor. This slows the AGV/AMR down, but doesn’t activate the braking function – deceleration speed is affected by the mobile robot’s inertia, so it coasts to a stop.
Safe Brake Control (SBC): safe braking engagement
Safety level: up to SIL2, PLd, Safety Category 3
SBC is commonly used to control external (mechanical) brakes, especially when the motor is off but still bearing a load (e.g. a hanging weight). SWD offers 2 engine braking modes for added support: internal motor braking and external braking.
The internal brake essentially works by short-circuiting the motor. The external brake works by cutting power to the electromechanical brake.
SBC often works in combination with STO. In SWD’s configuration, the STO function can be triggered with or without SBC.
Safe Direction Control (SDI): safe control of direction of rotation
Safety level: up to SIL2, PLd, Safety Category 3
SDI activation is based on commands that can prohibit rotation of the motor in either direction. This is designed to prevent the AGV/AMR from moving in an unintended direction – for example, toward a worker.
Similarly to SMS, SDI has positive and negative thresholds that represent the AGV/AMR’s forward or reverse motion. With SWD, it’s possible to set 2 threshold levels for positive movement and 2 for negative. When a threshold for the direction of movement is exceeded, SDI activates and prevents further motor rotation.
If SDI is active and the motor’s rotation speed exceeds the set threshold, this condition can also automatically trigger STO.
Safely Limited Speed (SLS, SLSa): safe speed limitation
Safety level: up to SIL2, PLd, Safety Category 3
SLS prevents the drive (the motor) from going over a pre-set target speed. Exceeding this speed triggers the safety function, activating and maintaining deceleration until the AGV/AMR reaches the target speed again. The SLS function continues to monitor the AGV/AMR’s speed to make sure it stays at the target level.
SWD has 8 levels of SLS speed limitation, so up to 8 different speed limits can be monitored at the same time. Speeds can be limited in both rotation directions (forward/reverse) in a symmetrical (SLS) or asymmetrical (SLSa) way.
If SLS is active and the motor’s rotation speed exceeds the set threshold, STO may be automatically triggered.
Safe Maximum Speed (SMS): maximum speed limitation independent of activated safety functions
Safety level: up to SIL2, PLd, Safety Category 3
SMS is the only safety function that’s always active if enabled by the configuration. It’s activated if a maximum speed threshold is set for the AGV/AMR. (This is different to the target speed(s) that can be set with SLS.)
If the user doesn’t specify a maximum speed when configuring SWD, SMS will remain inactive (disabled as a result of the configuration).
SWD users can set maximum positive and negative velocity commands – negative velocity referring to travel in the opposite direction than intended. The AGV/AMR’s velocity (speed) is constantly monitored. If the maximum speed is exceeded while SMS is active, the default response is to trigger STO.
Safety Wheel Drive: a solution that lives up to its name
Safety Wheel Drive enables AGV/AMR designers to embed advanced safety functions into their build, without any additional components or effort. Explore the many other benefits of Safety Wheel Drive here on the IDEC website.
We provide a wide range of help and resources:
If you have questions or suggestions, we're here to listen.
Our sales and support teams are on hand to help.
All the technical documentation you need.